Tema 4.- CONTROL Y ROBÓTICA
ÍNDICE
1.- Introducción
2.- Evolución de los sistemas automáticos
2.1.- Mecanización
2.2.- Automatización
2.3.- Robotización
3.-Sistemas de control
3.1.- Sistemas en lazo abierto
3.2.- Sistemas en lazo cerrado
3.3.- Sistemas discretos
3.4.- Elementos de un sistema de control
4.- El origen de los robots. Definiciones
5.- Componentes de un robot
5.1.- Sensores
5.2.- Unidad central
5.3.- Actuadores
5.4.- Estructura
5.5.- Mecanismos
5.6.- Lenguaje de programación
6.- Clasificaciones de los robots
6.1.- Según su cronología
6.2.- Según su arquitectura
7.- Tipos de robots industriales
8.-Aplicaciones del control automático: robots
9.-Diseño y construcción de robots no programables
10.- Actividades
1.- Introducción

Veamos primero la diferencia entre máquina, autómata y robot. Una máquina es capaz de realizar un trabajo dirigido por un usuario, el autómata es capaz de realizar el trabajo sencillo y repetitivo que le mandan sin necesidad de supervisión y el robot es capaz de decidir cuál es el trabajo que debe hacer.
Hoy día los robots están protagonizando numerosas noticias de actualidad debido a las constantes y vertiginosas innovaciones que se están produciendo en este campo.
Los robots están tomando posiciones en numerosos campos, sustituyendo tareas antes realizadas por personas o por otras máquinas. Dada la gran importancia de los avances en robótica, es necesario que el alumnos tenga una serie de conocimientos básicos en este campo, que seguro despertarán su curiosidad e interés.
2.- Evolución de los sistemas automáticos
Los sistemas automáticos surgen con la necesidad del hombre en ahorrar trabajo, esfuerzo y tiempo. También surgen en aquellas actividades donde se realizan tareas repetitivas y tediosas para las personas. Un ejemplo de ello sería el encendido automático de la iluminación de las calles, los semáforos, sistemas de riego, clasificación automática en almacenes, etc.
Al principio existían las herramientas de uso cotidiano, después surgieron herramientas especializadas sobre todo en trabajos artesanos. Después surgieron las máquinas herramienta como el torno, la fresadora, taladradoras, etc. Y por último se desarrollan los sistemas automáticos y los sistemas de control encargados de manejar las máquinas herramienta. Esto no implica el descenso de la mano de obra que utilizaba estás máquinas, sino la especialización de esas personas a un nivel superior, capaces de programar y mantener esos sistemas automatizados.
2.1.- Mecanización

Mecanización consiste en proveer a operadores humanos con maquinaria para ayudarles con los requerimientos físicos del trabajo. También puede referirse al uso de
máquinas para reemplazar la labor manual o el uso de animales. El siguiente paso de la mecanización es la
automatización.
El término es principalmente usado en el ámbito industrial. Con la aparición de herramientas mecanizadas, como el
torno propulsado por vapor se redujo drásticamente el tiempo necesario para llevar acabo diversas tareas, mejorando la productividad. Hoy en día, muy pocas de las labores de construcción se llevan a cabo con herramientas manuales.
2.2.- Automatización

La automatización Industrial (automatización; del griego antiguo auto: guiado por uno mismo) es el uso de sistemas o elementos computarizados y electromecánicos para controlar maquinarias y/o procesos industriales sustituyendo a operadores humanos.
La automatización abarca la
instrumentación industrial, que incluye los sensores, los transmisores de campo, los
sistemas de control y supervisión, los sistemas de transmisión y recolección de datos y las aplicaciones de software en tiempo real para supervisar, controlar las operaciones de plantas o procesos industriales.
2.3.- Robotización

Es el paso siguiente a la automatización y consisten en sustituir las tareas realizadas por seres humanos o máquinas automatizadas por robot que realizan la mismas tareas con una mayor prescisión y en menor tiempo. Además los robots no descansan y pueden estar trabajando las 24 horas del día.
3.-SISTEMA DE CONTROL
Un sistema de control puede definirse como un ente o conjunto de elementos que reciben unas acciones externas (pulsación de un interruptor, accionamiento de un motor, variación de temperatura, etc) que son almacenadas en las variables de entrada, a partir de las cuales el sistema realiza una serie de operaciones cuyos cálculos se almacenan en las variables de salida, que dan lugar a la respuesta del sistema mediante los actuadores (brazos robóticos, pinzas, motores, accionamientos neumáticos o hidráulicos, etc.)
3.1.- Sistemas en lazo abierto

Los sistemas de lazo abierto son aquellos donde no se controla el proceso, sino que las variables de entrada están asignadas por programa, haciendo una estimación del comportamiento del sistema, es decir, no hay retroalimentación ya que no se controlan las señales de salida para compararlas con las de entrada. Un ejemplo sería una lavadora automática que ejecuta un programa predeterminado donde no se controla el estado de la ropa, la cantidad, si la limpieza se está realizando correctamente, etc.
3.2.- Sistemas en lazo cerrado

Los sistemas de lazo cerrado son aquellos donde la variable controlada se compara periódicamente con la variable de entrada, es decir, hay retroalimentación y el sistema es capaz de analizar las desviaciones que se están produciendo y corregirlas modificando las variables de entrada o el proceso para que se ajuste a la salida esperada.
Un ejemplo sería un sistema de climatización con termostato, donde la temperatura programada se compara continuamente con la temperatura real de la estancia o local que queremos climatizar. De este modo el sistema apaga o enciende la fuente de calor o frio para acercarse a la temperatura programada.
El sistema estaría oscilando en torno a la temperatura establecida, ajustándose continuamente.
3.3.- Sistemas discretos
Son sistemas que toman un número finito de valores que son conocidos en instantes determinados de tiempo y que trabajan con datos muestreados. En un sistema continuo las variables de estado cambian de forma continua a lo largo del tiempo, mientras que en un sistema discreto cambian instantáneamente de valor en ciertos instantes de tiempo. Requieren el uso de ordenadores.
 3.4.- Elementos de un sistema de control
3.4.- Elementos de un sistema de control
Los elementos de un sistema de control son:
-
Señal de entrada: es la que se toma del exterior mediante un sensor.
-
Señal de referencia: punto de ajuste o de tarado, es el valor que se compara con la señal de entrada.
-
Comparador: compara las señales de referencia y entrada, cuando supera un
determinado valor entre ambas señales el elemento de control se activa, pasando la información al actuador para que ejecute la acción.
-
Actuador: lleva a cabo la acción para la que se ha diseñado el sistema automático.
-
Señal de salida: es la que emite el elemento de control (actuador).
-
Captador (sensores): son elementos que captan la información del entorno y la
usan para medir magnitudes físicas (luz, temperatura, humedad, presión,
intensidad de luz, etc).
-
Controlador: es el encargado de comparar una variable física con el valor
deseado (var. De referencia), interpretar el error y actuar para intentar anularlo.
El controlador o regulador constituye el elemento fundamental en un sistema de control, pues determina el comportamiento del bucle, ya que condiciona la acción del elemento actuador en función del error obtenido.
4.-El origen de los robots. Definiciones
La palabra robot se usó por primera vez en 1921 en la obra de teatro R.U.R. Robot proviene de la palabra checa robota que significa trabajador.
Nos empeñamos en construir robots por que son maquinas capaces de realizar tareas repetitivas con precisión. Estas tareas ahorran tiempo y esfuerzo a los seres humanos, los robots solo pueden hacer las cosas para lo que están destinados no pueden realizar otra tarea.
Con el tiempo acabaremos construyendo robot para que puedan tomar decisiones por si mismos.
En 1979, el “Robot Institute of America” define a un robot como: 'Un manipulador reprogramable y multifuncional diseñado para trasladar materiales, piezas, herramientas o aparatos específicos a través de una serie de movimientos programados para llevar a cabo una variedad de tareas'.
Los robots son capaces de realizar tareas repetitivas de forma más rápida, barata y precisa que los seres humanos. Se dice que un robot tiene inteligencia artificial (I.A.) debido a que tiene la capacidad de obtener información de su entorno y en función de esta actuar. Se considera a un robot como un agente autónomo inteligente cuando cumple los siguientes requisitos:

- Autonomía: El sistema de navegación reside en la propia máquina, que debe operar sin conexión física a equipos externos.
- Inteligencia: El robot posee capacidad de razonar hasta el punto de ser capaz de tomar sus propias decisiones y de seleccionar, fusionar e integrar las medidas de sus sensores.
5.- COMPONENTES DE UN ROBOT
Los robots constan de tres componentes principales:
- 5.1.- Los sensores que facilitan la información necesaria para que los robots interpreten el entorno en el que se desenvuelven. Percibe las características del entorno y el estado del mismo robot y los envían a la unidad de control, que decide qué secuencia de órdenes tienen que ejecutar los actuadores.

-->
El sensor de infrarrojos CNY70:
El dispositivo CNY70 es un sensor óptico infrarrojo, de un rango de corto alcance (menos de 5 cm) que se utiliza para detectar colores de objetos y superficies. Su uso más común es para construir pequeños robots siguelíneas. Contiene un emisor de radiación infrarroja -fotodiodo- y un receptor -fototransistor-. El fotodiodo emite un haz de radiación infrarroja, el fototransistor recibe ese haz de luz cuando se refleja sobre alguna superficie u objeto.
- 5.2 La unidad de control que se ocupa de procesar la información que recibe de los sensores y tomar decisiones de acuerdo con ella. Generalmente es un ordenador el que se encarga de controlar los diferentes componentes del robot para que ejecute las acciones previstas. Dicho ordenador sueles ir unido a una controladora que dispone de una serie de entradas y salidas a través de las cuales recibe las señales de los sensores y envía instrucciones a los actuadores.
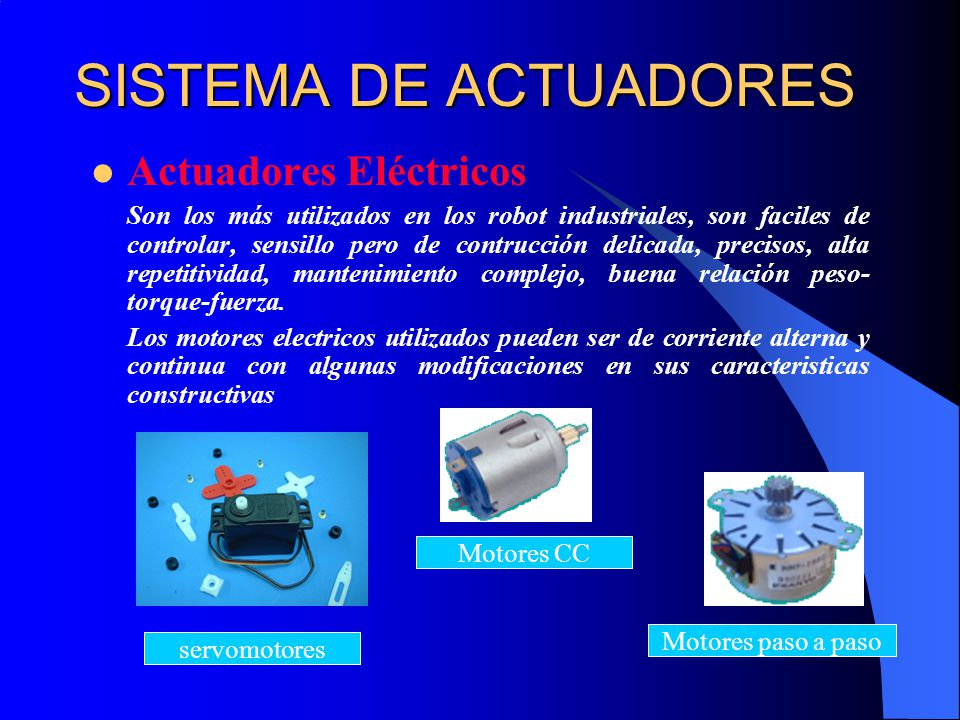
- 5.3.- Los actuadores que son aquellos elementos encargados de proporcionar la fuerza necesaria para dotar de movimiento a las articulaciones y extremidades del robot. Pueden ser hidráulicos, neumáticos o eléctricos, dependiendo de la fuerza y precisión que se quieran conseguir.
- Los actuadores eléctricos se usan en robots que no precisan una alta potencia y velocidad y en aquellas aplicaciones que piden exactitud y repetitividad.
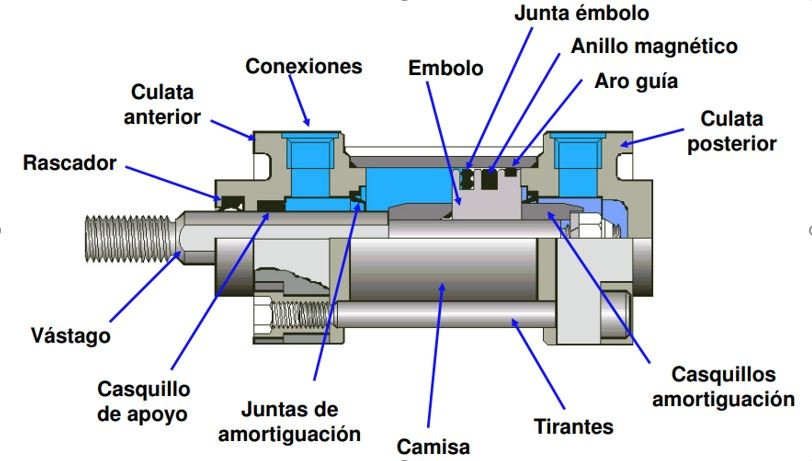
- Los actuadores neumáticos. La fuente de energía es el aire comprimido. Ofrecen poca precisión en el posicionamiento y se usan en circunstancias en las que es suficiente el posicionamiento de dos estados, como en la apertura y el cierre de unas pinzas.
- Los actuadores hidráulicos. La fuente de energía es el aceite mineral a alta presión. Se emplean en robots de gran envergadura en los que se precisa una velocidad alta y la manipulación de cargas pesadas.
5.4.- ESTRUCTURA DE LOS ROBOTS
La estructura de un robot puede variar en función de su diseño y propósito, pero por lo general está compuesta por los siguientes elementos:
- Estructura mecánica: es la parte física del robot que proporciona soporte y protección a los componentes electrónicos. Esta estructura puede ser rígida o flexible, y está diseñada para permitir el movimiento del robot en diferentes direcciones.
- Actuadores: son los elementos encargados de producir el movimiento del robot. Pueden ser motores eléctricos, hidráulicos o neumáticos, entre otros, y se encargan de controlar el movimiento de las diferentes partes del robot.
- Sensores: son los dispositivos encargados de medir diferentes variables físicas y enviar la información al sistema de control del robot. Pueden ser de diferentes tipos, como sensores de proximidad, de temperatura, de presión, de posición, etc.
- Sistema de control: es el cerebro del robot, encargado de recibir las señales de los sensores y enviar comandos a los actuadores para que el robot realice las acciones deseadas. Puede ser un sistema electrónico, un software de control o una combinación de ambos.
- Alimentación: es la fuente de energía del robot, que puede ser eléctrica, hidráulica, neumática, entre otras. Dependiendo del tipo de robot y su aplicación, puede tener una fuente de alimentación externa o una batería interna.
En resumen, la estructura de un robot es una combinación de elementos mecánicos, electrónicos y de control que le permiten realizar tareas específicas de forma autónoma o mediante la interacción con un operador humano.
5.5. MECANISMOS DE LOS ROBOTS
Los mecanismos principales de los robots pueden variar en función de su diseño y aplicación, pero por lo general incluyen los siguientes:
- Articulaciones: son los elementos que permiten el movimiento de las diferentes partes del robot. Pueden ser de diferentes tipos, como rotativas, lineales, esféricas, entre otras, y se utilizan para lograr movimientos complejos y precisos.
- Motores: son los elementos encargados de generar la energía necesaria para producir el movimiento de las diferentes partes del robot. Pueden ser motores eléctricos, hidráulicos o neumáticos, y se utilizan para controlar el movimiento de las articulaciones y otros mecanismos del robot.
Actuadores: son los elementos encargados de transformar la energía del motor en movimiento mecánico. Pueden ser cilindros hidráulicos, motores eléctricos, motores lineales, entre otros, y se utilizan para mover diferentes partes del robot, como brazos, pinzas, ruedas, etc.
Sensores: son los elementos encargados de medir diferentes variables físicas, como la posición, la velocidad, la fuerza, la temperatura, entre otras, y enviar la información al sistema de control del robot. Los sensores se utilizan para monitorizar el entorno del robot y para detectar obstáculos y otros elementos relevantes para su operación.
- Controladores: son los elementos encargados de procesar la información de los sensores y enviar comandos a los motores y actuadores para controlar el movimiento del robot. Pueden ser controladores electrónicos, software de control, o una combinación de ambos.
En resumen, los mecanismos principales de los robots incluyen elementos mecánicos, eléctricos y electrónicos que permiten el movimiento preciso y controlado de diferentes partes del robot, así como la monitorización y control de su entorno.
5.6.-LENGUAJES DE PROGRAMACIÓN PARA ROBOTS
Existen varios lenguajes de programación que se utilizan para programar robots, algunos de los principales son:
- Lenguaje de programación C/C++: es un lenguaje de programación de propósito general que se utiliza ampliamente en la programación de sistemas embebidos y en la robótica. Es un lenguaje de bajo nivel que ofrece un alto grado de control sobre el hardware y se utiliza para programar robots que requieren un alto rendimiento y una programación de baja latencia.
Lenguaje de programación Python:
es un lenguaje de programación de alto nivel que se utiliza ampliamente en la robótica debido a su facilidad de uso y capacidad para trabajar con diferentes plataformas y bibliotecas de software. Es un lenguaje flexible y dinámico que se utiliza para programar robots que requieren una programación más rápida y sencilla.
- Lenguaje de programación Java: es un lenguaje de programación de propósito general que se utiliza ampliamente en la programación de sistemas embebidos y en la robótica. Es un lenguaje de alto nivel que ofrece un alto grado de portabilidad y se utiliza para programar robots que requieren una programación más modular y escalable.
- Lenguaje de programación MATLAB: es un lenguaje de programación especializado en el procesamiento de señales y datos numéricos. Se utiliza en la robótica para programar robots que requieren una programación de alto nivel para el procesamiento de datos y la simulación de sistemas.
Lenguaje de programación ROS (Robot Operating System):
es un framework de software libre y de código abierto que se utiliza ampliamente en la robótica para desarrollar aplicaciones robóticas complejas. Es un lenguaje de programación que se basa en C++ y Python y ofrece una gran variedad de bibliotecas y herramientas para la programación de robots.
En resumen, los principales lenguajes de programación para robots son C/C++, Python, Java, MATLAB y ROS, y su elección depende del tipo de robot y de las necesidades de programación específicas de cada proyecto.
6.-CLASIFICACIÓN DE LOS ROBOTS
Los robots se pueden clasificar en función de diferentes criterios, como su diseño, su aplicación, su capacidad de movimiento, entre otros. A continuación, se presentan las principales clasificaciones generales de los robots:
- Según su grado de libertad: los robots se clasifican según el número de grados de libertad que tienen, es decir, el número de ejes de movimiento que pueden controlar. Se pueden clasificar en robots de 1, 2, 3, 4, 5 o 6 grados de libertad, entre otros.
- Según su aplicación: los robots se clasifican según la tarea para la que han sido diseñados. Algunos ejemplos de aplicaciones de robots son soldadura, pintura, ensamblaje, manipulación, inspección, entre otras.
- Según su capacidad de movimiento: los robots se clasifican según su capacidad de movimiento en robots móviles y robots estacionarios. Los robots móviles pueden desplazarse de un lugar a otro y suelen tener ruedas o patas para moverse, mientras que los robots estacionarios se mantienen fijos en un lugar.
- Según su grado de autonomía: los robots se clasifican según su capacidad de operar de forma autónoma o bajo la supervisión humana. Los robots autónomos pueden tomar decisiones y realizar tareas sin intervención humana, mientras que los robots teleoperados requieren la supervisión humana.
Según su estructura:
los robots se clasifican según su estructura en robots cilíndricos, robots cartesianos, robots SCARA, robots delta, entre otros. Cada tipo de estructura tiene sus propias ventajas y desventajas y se utiliza en diferentes aplicaciones.
En resumen, la clasificación de los robots depende del criterio utilizado y de las características específicas de cada robot. Sin embargo, las clasificaciones más comunes se basan en el grado de libertad, la aplicación, la capacidad de movimiento, el grado de autonomía y la estructura del robot.
6.1.-Según su cronología
Los robots también se pueden clasificar según su cronología, es decir, según la época en que fueron desarrollados. A continuación se presenta una clasificación general de los robots según su cronología:
- Primera generación de robots (1950-1960): durante esta época se desarrollaron los primeros robots industriales, también conocidos como robots manipuladores. Estos robots eran capaces de realizar tareas repetitivas y sencillas en la industria.
- Segunda generación de robots (1960-1970): durante esta época se desarrollaron los robots de control numérico y los robots de ensamblaje. Los robots de control numérico eran capaces de realizar operaciones complejas de mecanizado, mientras que los robots de ensamblaje se utilizaban para ensamblar piezas en la industria.
- Tercera generación de robots (1970-1980): durante esta época se desarrollaron los robots móviles y los robots de soldadura. Los robots móviles se utilizaban para tareas de exploración y rescate, mientras que los robots de soldadura se utilizaban para soldar piezas en la industria.
- Cuarta generación de robots (1980-1990): durante esta época se desarrollaron los robots con sensores y los robots colaborativos. Los robots con sensores eran capaces de detectar el entorno y adaptar su comportamiento, mientras que los robots colaborativos trabajaban en estrecha colaboración con los seres humanos.
- Quinta generación de robots (1990-2000): durante esta época se desarrollaron los robots inteligentes y los robots biomiméticos. Los robots inteligentes eran capaces de aprender y tomar decisiones, mientras que los robots biomiméticos se inspiraban en la naturaleza para desarrollar robots con características como la locomoción animal.
- Sexta generación de robots (2000-presente): durante esta época se han desarrollado los robots autónomos y los robots de servicios. Los robots autónomos son capaces de operar sin intervención humana, mientras que los robots de servicios se utilizan en aplicaciones como la limpieza y la atención al cliente.
En resumen, la clasificación de los robots según su cronología muestra cómo ha evolucionado la robótica a lo largo del tiempo, desde los primeros robots industriales hasta los robots autónomos y de servicios actuales.
6.2.-Según su arquitectura
Los robots también se pueden clasificar según su arquitectura, es decir, según la estructura física y mecánica que tienen. A continuación se presenta una clasificación general de los robots según su arquitectura:
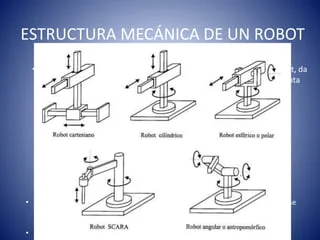
- Robots cartesianos: también conocidos como robots de coordenadas rectangulares, tienen tres ejes lineales y utilizan un sistema de coordenadas cartesianas para mover su brazo mecánico.
- Robots cilíndricos: tienen un brazo mecánico en forma de cilindro y utilizan coordenadas cilíndricas para mover el brazo en la dirección correcta.
- Robots esféricos: también conocidos como robots delta, tienen un brazo mecánico en forma de esfera y se utilizan para tareas de alta velocidad y precisión.
- Robots antropomórficos: tienen un brazo mecánico similar al brazo humano y son capaces de moverse en múltiples direcciones.
Robots serpientes:
también conocidos como robots serpentinos, tienen un brazo mecánico flexible y articulado, que les permite moverse en espacios estrechos y difíciles de alcanzar.
- Robots híbridos: combinan características de dos o más tipos de robots mencionados anteriormente, lo que les permite realizar una amplia variedad de tareas.

En resumen, la clasificación de los robots según su arquitectura muestra cómo se han desarrollado diferentes tipos de robots para adaptarse a diferentes tareas y entornos. Cada tipo de robot tiene sus propias ventajas y desventajas en términos de velocidad, precisión y capacidad de carga, por lo que es importante seleccionar el tipo de robot adecuado para una tarea específica.
7.- TIPOS DE ROBOTS INDUSTRIALES Los robots industriales son utilizados en una amplia variedad de aplicaciones industriales, desde la fabricación de automóviles hasta la producción de alimentos. A continuación se presentan los principales tipos de robots industriales:
Robots de manipulación:
son los robots más comunes en la industria y se utilizan principalmente para realizar tareas de manipulación de materiales y productos. Tienen una estructura mecánica sencilla y están diseñados para levantar, mover y colocar objetos.
- Robots soldadores: se utilizan para realizar tareas de soldadura en la industria automotriz, aeronáutica y de construcción. Estos robots suelen estar equipados con sistemas de visión para detectar la posición y la forma de las piezas que se van a soldar.
- Robots de paletización: se utilizan para la carga y descarga de productos en líneas de producción. Estos robots son capaces de mover objetos de diferentes tamaños y pesos, y de colocarlos en patrones específicos en palets o contenedores.
- Robots de ensamblaje: se utilizan para unir diferentes componentes y partes de productos en líneas de producción. Estos robots pueden ser programados para realizar tareas de ensamblaje precisas y repetitivas.
- Robots de pintura: se utilizan para aplicar pintura en superficies de objetos, como automóviles, aviones y productos electrónicos. Estos robots están equipados con sistemas de pulverización y pistolas de pintura.
- Robots de corte: se utilizan para cortar materiales en la industria metalúrgica, automotriz y aeronáutica. Estos robots pueden cortar diferentes materiales, como acero, aluminio y plástico, y son capaces de realizar cortes precisos y repetitivos.
En resumen, estos son algunos de los principales tipos de robots industriales que se utilizan en la actualidad. Cada tipo de robot está diseñado para realizar tareas específicas en diferentes industrias, y su uso ha permitido aumentar la productividad y mejorar la calidad de los productos fabricados.
8.-Aplicaciones del control automático: robots El control automático juega un papel fundamental en el funcionamiento y la programación de los robots. Algunas de las aplicaciones del control automático relacionadas con los robots son:
- Control de posición: el control de posición es utilizado para determinar la posición exacta de un robot en un espacio de trabajo. Este control se realiza mediante sensores de posición, como encoders, que permiten conocer la posición exacta del robot en todo momento.
- Control de velocidad: el control de velocidad se utiliza para controlar la velocidad de movimiento de un robot. Este control se realiza mediante la regulación de la tensión o la corriente suministrada al motor del robot.
- Control de torque: el control de torque se utiliza para controlar la fuerza que el robot aplica en un objeto o material. Este control se realiza mediante el uso de sensores de fuerza, que permiten medir la fuerza que el robot aplica en un objeto.
- Control de trayectoria: el control de trayectoria se utiliza para controlar la ruta que sigue el robot en un espacio de trabajo. Este control se realiza mediante la programación de la trayectoria del robot, que puede ser lineal o curva.
- Control de impedancia: el control de impedancia se utiliza para controlar la resistencia que el robot ofrece a un objeto o material. Este control se realiza mediante el uso de sensores de fuerza y posición, que permiten medir la fuerza y la posición del objeto que el robot está manipulando.
En resumen, el control automático es esencial para el funcionamiento de los robots
9.-Diseño y construcción de robots no programables
Los robots no programables son aquellos que no están diseñados para ser programados en el sentido tradicional del término, ya que se les ha dotado de una inteligencia artificial que les permite aprender y adaptarse a diferentes situaciones. Sin embargo, su diseño y construcción todavía requiere de una planificación y un proceso de desarrollo cuidadoso. A continuación se describen algunas consideraciones importantes en el diseño y construcción de robots no programables:
Diseño mecánico: El diseño mecánico es un aspecto fundamental en el desarrollo de robots no programables. Se debe considerar la forma y la estructura del robot para garantizar que pueda moverse con fluidez y eficacia en diferentes entornos. Además, se debe asegurar que los materiales y componentes mecánicos sean lo suficientemente resistentes para soportar el uso repetitivo.
Sensores: Los robots no programables necesitan estar equipados con sensores que les permitan percibir su entorno y tomar decisiones en consecuencia. Los sensores pueden incluir cámaras, micrófonos, sensores de proximidad, sensores de luz, entre otros.
Controladores: El controlador es el cerebro del robot y es responsable de procesar la información recibida de los sensores y tomar decisiones. Los controladores pueden ser sistemas electrónicos complejos que incorporan redes neuronales y algoritmos de aprendizaje automático para adaptarse a diferentes situaciones.
Fuente de energía: Los robots no programables necesitan una fuente de energía que les permita funcionar de manera autónoma. Esto puede ser una batería recargable, un sistema de energía solar o cualquier otro sistema de alimentación adecuado para el robot en cuestión.
Entrenamiento: Aunque los robots no programables pueden aprender y adaptarse a su entorno, todavía necesitan ser entrenados para realizar tareas específicas. Esto puede implicar la exposición del robot a diferentes situaciones para que pueda aprender a responder de manera adecuada.
En resumen, el diseño y la construcción de robots no programables requiere de un enfoque multidisciplinario que abarca aspectos mecánicos, electrónicos, de software y de inteligencia artificial. Los sensores, controladores y fuente de energía son componentes críticos que deben ser seleccionados cuidadosamente para garantizar el éxito del robot. Además, el entrenamiento es esencial para que el robot pueda aprender y adaptarse a diferentes situaciones.
9.1.- Diseño y construcción de sencillos robots en la educación secundaria y bachillerato. El diseño y la construcción de robots es una excelente actividad educativa para estudiantes de secundaria y bachillerato, ya que les permite aplicar conocimientos de física, matemáticas, electrónica y programación de manera práctica y divertida. A continuación, se describen algunos consejos para el diseño y construcción de sencillos robots en la educación secundaria y bachillerato:
Identificar los objetivos de aprendizaje: Antes de comenzar con el diseño y la construcción del robot, es importante definir los objetivos de aprendizaje que se desean lograr. Por ejemplo, se puede tener como objetivo enseñar a los estudiantes sobre circuitos eléctricos, la programación de microcontroladores o la mecánica de los robots.
Seleccionar el tipo de robot: Los robots pueden ser diseñados para cumplir diferentes objetivos, como moverse, levantar objetos, realizar tareas de soldadura, entre otros. Para un proyecto educativo sencillo, se recomienda seleccionar un tipo de robot que se ajuste a los objetivos de aprendizaje y que pueda ser construido con materiales y componentes asequibles.
Seleccionar los materiales y componentes: Una vez seleccionado el tipo de robot, se deben elegir los materiales y componentes que se utilizarán para su construcción. Es importante elegir materiales y componentes asequibles y fáciles de conseguir.
Diseñar el robot: Una vez seleccionados los materiales y componentes, se debe diseñar el robot. Se puede utilizar software de diseño CAD para crear un modelo en 3D del robot y planificar su construcción.
Construir el robot: Una vez diseñado el robot, se debe proceder con su construcción. Es importante seguir las instrucciones de diseño cuidadosamente y tomar en cuenta medidas de seguridad al utilizar herramientas y equipos.
Programar el robot: Una vez construido el robot, se debe programar su comportamiento. Se pueden utilizar lenguajes de programación como C++, Python o Scratch para programar el robot y controlar su comportamiento.
Probar y mejorar el robot: Una vez programado el robot, se debe probar su funcionamiento y hacer mejoras si es necesario. Se pueden hacer ajustes en el diseño, los materiales y la programación para mejorar el desempeño del robot.
En resumen, el diseño y la construcción de sencillos robots en la educación secundaria y bachillerato es una actividad educativa interesante y divertida que permite a los estudiantes aplicar conocimientos de física, matemáticas, electrónica y programación en la práctica. Es importante definir los objetivos de aprendizaje, seleccionar el tipo de robot, elegir los materiales y componentes, diseñar el robot, construirlo, programarlo y mejorar su desempeño a través de pruebas y ajustes.
9.2.- Kits de robótica más utilizados en la enseñanza secundaria
Existen varios kits de robótica que son populares y ampliamente utilizados en la enseñanza secundaria debido a su accesibilidad, facilidad de uso y capacidad de enseñar a los estudiantes sobre conceptos importantes de robótica, electrónica y programación. Algunos de los kits de robótica más populares son:
LEGO Mindstorms: LEGO Mindstorms es un kit de robótica educativo que permite a los estudiantes construir y programar robots utilizando bloques LEGO y un microcontrolador programable. Este kit es muy popular debido a su accesibilidad y a la gran cantidad de recursos educativos disponibles.
VEX Robotics: VEX Robotics es un kit de robótica que incluye componentes modulares que se pueden ensamblar para crear diferentes tipos de robots. Este kit es muy popular en competencias de robótica y es utilizado por muchos equipos de estudiantes en todo el mundo.
Arduino: Arduino es un microcontrolador programable que se utiliza ampliamente en proyectos de electrónica y robótica. Existen varios kits de inicio de Arduino que incluyen los componentes necesarios para construir proyectos de robótica y electrónica.
Raspberry Pi:
Raspberry Pi es un pequeño ordenador de placa única que se utiliza en una variedad de proyectos de electrónica y robótica. Existen kits de inicio de Raspberry Pi que incluyen los componentes necesarios para construir proyectos de robótica y electrónica.
- Makeblock: Makeblock es un kit de robótica modular que permite a los estudiantes construir y programar robots de manera sencilla y accesible. Este kit es popular en la educación secundaria debido a su facilidad de uso y a la gran cantidad de recursos educativos disponibles.

Microbit con Makecode: El kit de robótica Microbit con Makecode es un conjunto de herramientas y componentes para la construcción y programación de robots utilizando la placa Microbit y el lenguaje de programación Makecode. Este kit es muy utilizado en la educación secundaria y se compone de los siguientes elementos:
Placa Microbit: Es una pequeña placa programable que cuenta con una pantalla LED, sensores y conectividad Bluetooth.
Kit de construcción: El kit de construcción incluye piezas para construir un robot, como motores, ruedas, piezas de ensamblaje, sensores y cables.
- Lenguaje de programación Makecode: Es un entorno de programación en línea que utiliza bloques para programar la placa Microbit. Makecode es muy accesible y fácil de usar, permitiendo a los estudiantes construir y programar robots de manera sencilla.
Tutoriales y recursos educativos: Makecode cuenta con una gran cantidad de tutoriales y recursos educativos en línea que permiten a los estudiantes aprender sobre electrónica, robótica y programación de manera interactiva y divertida.
En resumen, existen varios kits de robótica que son populares y ampliamente utilizados en la enseñanza secundaria debido a su accesibilidad, facilidad de uso y capacidad de enseñar a los estudiantes sobre conceptos importantes de robótica, electrónica y programación. Algunos de los kits de robótica más populares incluyen LEGO Mindstorms, VEX Robotics, Arduino, Raspberry Pi y Makeblock.
10.-ACTIVIDADES
Actividad 1: Realizar una presentación sobre "Los Robots"
Actividad 2: Realizar un cuestionario de 20 preguntas sobre este tema, para ello vamos a utilizar los siguientes documentos:
En este
enlace de la Junta de Andalucía accedemos al mismo documento
En este enlace tenéis la web del Ministerio de Educación y cultura:
Cidead
10.- Actividades