Cuestionario Tema 6.- Control automático y Robótica.
1.- ¿Qué es la mecanización?
Empleo de máquinas para realizar una actividad, con objeto de emplear menos tiempo y esfuerzo.
Definición técnica: mecanización es el proceso mediante el cual se procede al reemplazo, ya sea total o parcial, del trabajo humano o animal por el trabajo mecanizado o producido por máquinas.
La mecanización, por tanto, es el proceso mediante el que se implanta el uso de máquinas para la realización del trabajo que, previamente, estaba siendo desarrollado por animales o humanos. Cuando hacemos referencia a la mecanización, en determinadas situaciones, también puede hacer referencia al uso de herramientas de mano y utensilios que facilitan el trabajo humano.
2.- ¿En qué consiste la automatización?
Consiste en usar la tecnología para realizar tareas casi sin la necesidad de las personas.
Podemos definir qué es la Automatización Industrial o Industrial Automation en inglés, como el uso de máquinas electromecánicas de robótica industrial o por sistemas por computadora que realizan de manera automática y autónoma los procesos que se ejecutan en una empresa.
La automatización de los procesos permite que los sistemas de producción sean controlados y monitorizados mediante diferentes tecnologías digitales.
Fuente: https://revistaderobots.com/industria/automatizacion-industrial/
3.- ¿Qué es la robotización?
La robotización hace referencia al uso de robots en los procesos de producción.
El concepto hace referencia al uso de máquinas en procesos de producción, pero en el uso común en entornos relacionados con la Cuarta Revolución Industrial, se conoce como robotización a la acción de sustituir al ser humano en ciertas tareas que pueden realizar las máquinas.
Estas tareas, además, son cada vez más dada la rápida evolución que están experimentando los robots de cualquier tipo.
4.- ¿Qué es un sistema de lazo abierto?
Un sistema de lazo abierto es un tipo de sistema de control en el cual la señal de control se envía directamente a la planta o proceso que se desea controlar sin tener en cuenta la salida actual del sistema. En otras palabras, en un sistema de lazo abierto, la entrada del sistema es independiente de la salida, lo que significa que no se utiliza ninguna retroalimentación para corregir el proceso de acuerdo con la salida deseada.
Este tipo de sistema se utiliza comúnmente en procesos donde la salida deseada es constante y no hay necesidad de ajustar la salida en tiempo real en respuesta a cambios en las condiciones del proceso. Algunos ejemplos de sistemas de lazo abierto incluyen hornos, sistemas de iluminación y sistemas de riego programados para regar un jardín a intervalos específicos.
Es importante destacar que los sistemas de lazo abierto no son adecuados para procesos en los que se requiere una alta precisión en la salida o en los que las condiciones del proceso cambian constantemente, ya que no hay manera de corregir el proceso en tiempo real. En estos casos, se utilizan sistemas de lazo cerrado, que utilizan retroalimentación para ajustar el proceso de acuerdo con la salida deseada.
Son los que carecen de realimentación, se pueden considerar simples máquinas automáticas.
5.- ¿Qué es un sistema de lazo cerrado?
Un sistema de lazo cerrado es un tipo de sistema de control en el cual la salida del sistema se mide y se utiliza para ajustar la entrada del sistema, de manera que la salida se acerque a un valor deseado. En otras palabras, en un sistema de lazo cerrado, la entrada del sistema se ajusta continuamente en función de la salida real, utilizando un mecanismo de retroalimentación.
Este tipo de sistema se utiliza comúnmente en procesos donde se requiere un alto nivel de precisión en la salida o en los que las condiciones del proceso cambian constantemente. Algunos ejemplos de sistemas de lazo cerrado incluyen sistemas de control de temperatura, sistemas de control de velocidad de motores, sistemas de control de nivel de líquidos, entre otros.
En un sistema de lazo cerrado, la señal de salida del proceso se mide utilizando un sensor y se compara con la señal de referencia o valor deseado. La diferencia entre la señal de salida y la señal de referencia se llama error, y este error se utiliza para calcular la señal de control que se envía al proceso. La señal de control se ajusta continuamente en función del error, de manera que el proceso se acerque cada vez más al valor deseado.
Es importante destacar que los sistemas de lazo cerrado pueden ser más complejos y costosos que los sistemas de lazo abierto, pero ofrecen una mayor precisión y flexibilidad en el control del proceso.
Son los que tienen realimentación: se toman continuamente muestras de la variable a controlar.
6.- ¿Cuál es la diferencia entre máquina, autómata y robot?
Aunque estos términos a menudo se usan indistintamente, hay diferencias importantes entre máquinas, autómatas y robots. A continuación, se describen brevemente estas diferencias:
Máquina: una máquina es un dispositivo mecánico que realiza una tarea específica, como un motor de combustión interna, una cortadora de césped o una prensa hidráulica. Las máquinas pueden ser accionadas manualmente o mediante un motor eléctrico o una fuente de energía similar. A menudo, las máquinas son diseñadas para realizar una tarea específica de manera repetitiva y sin la capacidad de tomar decisiones.
Autómata: un autómata es un dispositivo mecánico o electrónico programable que se utiliza para controlar una serie de operaciones mecánicas. Los autómatas son sistemas de control industrial que se utilizan para controlar procesos automatizados, como líneas de producción en fábricas, sistemas de tratamiento de aguas o sistemas de control de tráfico.
Robot: un robot es una máquina programable que es capaz de realizar tareas complejas y variadas de manera autónoma. Los robots pueden ser diseñados para realizar tareas que van desde la soldadura en fábricas hasta la exploración espacial. Los robots están equipados con sensores y sistemas de control que les permiten interactuar con su entorno y tomar decisiones basadas en la información que reciben.
En resumen, mientras que una máquina es un dispositivo mecánico que realiza una tarea específica, un autómata es un sistema de control programable utilizado para controlar procesos automatizados y un robot es una máquina programable que es capaz de realizar tareas complejas y variadas de manera autónoma. Un autómata es una entidad artificial que se mueve por sí misma, un robot es una entidad artificial que realiza varias tareas al mismo tiempo y la secuencia de las operaciones se pueden cambiar y una maquina es un objeto que se usa para facilitar tareas.
7.- ¿Cúal es la definición de robótica?
La robótica es una rama de la tecnología que se ocupa del diseño, construcción, operación y aplicación de robots. Los robots son máquinas programables que pueden llevar a cabo tareas de manera autónoma o semiautónoma y que pueden interactuar con el mundo físico mediante sensores y actuadores.
La robótica combina diferentes disciplinas, como la ingeniería mecánica, la electrónica, la informática y la inteligencia artificial, para crear sistemas robotizados que puedan realizar tareas complejas. Los robots pueden ser diseñados para una amplia variedad de aplicaciones, como la fabricación, la exploración espacial, la asistencia médica, la seguridad, la agricultura y el entretenimiento.
Además de su aplicación en la industria, la robótica también se utiliza en la investigación y el desarrollo de tecnologías futuras, como la robótica de enjambres, la robótica colaborativa y la robótica autónoma. La robótica es una de las áreas de la tecnología que se espera que tenga un impacto significativo en la sociedad en las próximas décadas.
Técnica que se utiliza en el diseño y la construcción de robots y aparatos que realizan operaciones o trabajos.
8. ¿Cuál es el origen de la robótica?
Su origen viene de la palabra esclava robota, que se refiere al trabajo realizado de manera forzada.
El origen de la robótica se remonta a la antigüedad, donde se encuentran ejemplos de máquinas y autómatas que realizaban tareas específicas. Sin embargo, la robótica moderna comenzó a tomar forma en la década de 1950, cuando se desarrollaron los primeros robots industriales.
Uno de los primeros robots industriales fue el "Unimate", desarrollado por George Devol y Joseph Engelberger en 1954. Este robot era capaz de realizar tareas de soldadura y manejo de materiales en una línea de producción. A partir de entonces, la robótica se desarrolló rápidamente, y en la década de 1960 se introdujeron robots controlados por computadora que podían realizar tareas más complejas.
En la década de 1970, se introdujeron los robots cartesianos, que se caracterizaban por tener tres ejes de movimiento lineal y que se utilizaban principalmente en la fabricación de piezas y componentes electrónicos. En la década de 1980, se desarrollaron robots más avanzados que podían realizar tareas de soldadura, pintura y ensamblaje en la industria del automóvil.
En las últimas décadas, la robótica ha seguido evolucionando y expandiéndose a una amplia variedad de aplicaciones, desde la asistencia médica hasta la exploración espacial. Además, la robótica ha sido impulsada por el desarrollo de tecnologías como la inteligencia artificial, la visión por computadora y la robótica colaborativa, que están abriendo nuevas posibilidades para la automatización de tareas y la interacción humano-robot.
9. ¿Cuáles son los componentes de los robots?
Los componentes de los robots pueden variar dependiendo del tipo y propósito del robot, pero en general, los robots tienen los siguientes componentes principales:
Controlador: es el "cerebro" del robot que controla y coordina los movimientos de los actuadores y los sensores.
Actuadores: son los componentes que permiten al robot moverse y realizar tareas. Los actuadores pueden ser eléctricos, hidráulicos o neumáticos y suelen incluir motores, cilindros y válvulas.
Sensores: son los componentes que permiten al robot interactuar con su entorno y recopilar información sobre él. Los sensores pueden incluir cámaras, micrófonos, sensores de fuerza, sensores de posición y sensores de temperatura, entre otros.
Efectores finales: son los componentes que se utilizan para interactuar con el entorno, como garras, pinzas, soldadores, entre otros.
Unidad de alimentación: es el componente que suministra energía al robot. Puede ser una batería, un sistema de cableado o una fuente de alimentación externa.
Chasis: es la estructura física del robot que le da soporte y le permite moverse.
Software: es el conjunto de instrucciones que el robot utiliza para realizar tareas. Incluye el sistema operativo del robot, el software de programación y el software de control.
En resumen, los componentes de los robots pueden variar según el tipo y propósito del robot, pero en general, incluyen un controlador, actuadores, sensores, efectores finales, unidad de alimentación, chasis y software.
10.¿Qué son los actuadores?
Es un elemento electromecánico empleado para activar el funcionamiento de los dispositivos.
Los actuadores son componentes de los robots y otros sistemas automatizados que convierten la energía en movimiento. En otras palabras, son los componentes que permiten al robot moverse y realizar tareas. Los actuadores pueden ser eléctricos, hidráulicos o neumáticos, y su elección dependerá del tipo de tarea que el robot deba realizar.
Los actuadores eléctricos son los más comunes en los robots, ya que son fáciles de controlar y proporcionan un buen nivel de precisión y repetibilidad. Los motores eléctricos son los actuadores más comunes y se utilizan para controlar el movimiento de los brazos y las piernas de los robots, así como para accionar las ruedas y otras partes móviles.
Los actuadores hidráulicos utilizan líquidos para crear movimiento, lo que les permite generar una gran cantidad de fuerza. Se utilizan comúnmente en aplicaciones industriales pesadas, como en la fabricación de maquinaria pesada y equipos de construcción.
Los actuadores neumáticos utilizan aire comprimido para generar movimiento y se utilizan en aplicaciones donde se requiere un movimiento rápido y preciso, como en la automatización de líneas de producción.
En general, los actuadores son componentes esenciales de los robots y otros sistemas automatizados, ya que permiten que el sistema realice tareas físicas y se mueva en el entorno.
11. ¿Qué son los sensores?
Es un dispositivo capacitado para captar acciones o estímulos externos y responder en consecuencia.
Los sensores son componentes de los robots y otros sistemas automatizados que detectan y miden las condiciones físicas del entorno, como la luz, el sonido, la temperatura, la presión, la posición, la velocidad, la aceleración y la fuerza, entre otras. Los sensores convierten las señales físicas en señales eléctricas que el controlador del robot puede interpretar y utilizar para tomar decisiones.
Existen muchos tipos diferentes de sensores utilizados en robótica, incluyendo:Sensores de posición: miden la posición y la orientación de las partes móviles del robot.
Sensores de velocidad y aceleración: miden la velocidad y la aceleración del robot, lo que es importante para el control del movimiento.
Sensores de fuerza: miden la fuerza ejercida por el robot sobre el entorno o la fuerza ejercida por el entorno sobre el robot.
Sensores de proximidad: detectan objetos cercanos al robot y se utilizan para evitar colisiones y para la navegación autónoma.
Sensores de visión: capturan imágenes del entorno y se utilizan para reconocimiento de objetos, navegación y otras tareas de percepción.
Sensores táctiles: miden la presión y la fuerza en contacto con el entorno y se utilizan para la interacción física con el entorno.
En resumen, los sensores son componentes clave de los robots que permiten la percepción y la interacción con el entorno. Los sensores convierten las señales físicas en señales eléctricas que el controlador del robot puede interpretar y utilizar para tomar decisiones y realizar tareas.
12. ¿Qué es la unidad de control?
Es lo que se encarga de buscar las instrucciones en la memoria principal, descodificarlas y ejecutarlas.
La unidad de control es el componente central del sistema de control de un robot. Es el cerebro que procesa la información de los sensores, toma decisiones y controla los actuadores para ejecutar las tareas del robot. La unidad de control es el componente responsable de la programación y control del robot.
La unidad de control puede ser una computadora especializada, un microcontrolador o un sistema embebido dedicado. La unidad de control recibe información de los sensores y procesa esta información para tomar decisiones sobre qué acción tomar. Por ejemplo, si un sensor de proximidad detecta un obstáculo cercano, la unidad de control podría enviar una señal para detener el movimiento del robot para evitar una colisión.
La unidad de control también es responsable de la coordinación de los movimientos del robot. Para lograr una coordinación eficaz, la unidad de control debe coordinar la velocidad, posición y orientación de los distintos actuadores del robot. Esto se logra a través de algoritmos de control que toman en cuenta las capacidades y limitaciones físicas de los actuadores y el entorno en el que opera el robot.
En resumen, la unidad de control es el componente central del sistema de control de un robot y es responsable de procesar la información de los sensores, tomar decisiones y coordinar los movimientos de los actuadores para ejecutar las tareas del robot.
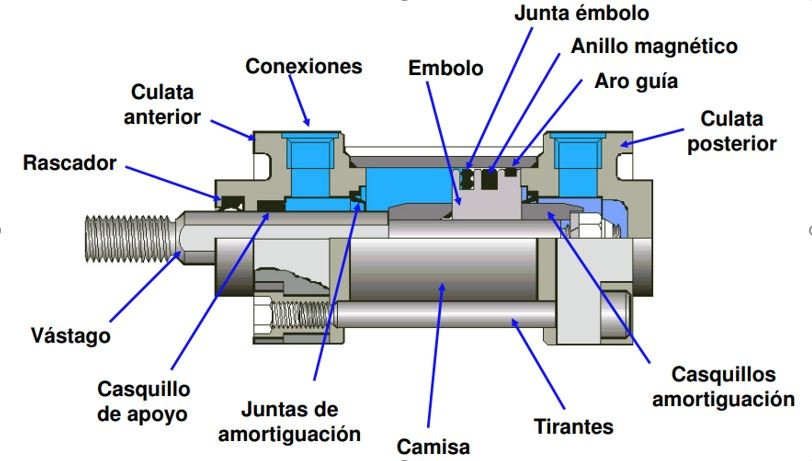
13.¿Qué son los actuadores neumáticos?
Son los actuadores que convierten la energía del aire comprimido en movimiento mecánico.
Los actuadores neumáticos son dispositivos que convierten la energía del aire comprimido en movimiento lineal o rotativo. Los actuadores neumáticos se utilizan comúnmente en robótica y en la automatización industrial para controlar el movimiento de piezas y herramientas.
Un actuador neumático típico consiste en un cilindro neumático que contiene un pistón y una varilla de conexión. El aire comprimido se suministra al cilindro a través de una válvula, que controla la cantidad de aire que entra o sale del cilindro. Cuando se suministra aire al cilindro, el pistón se mueve hacia fuera y empuja la varilla de conexión, lo que crea un movimiento lineal o rotativo.
Los actuadores neumáticos tienen varias ventajas, como una alta velocidad de respuesta, una gran capacidad de carga y una larga vida útil. Además, los actuadores neumáticos son resistentes a ambientes hostiles, como temperaturas extremas, ambientes húmedos y ambientes corrosivos.
Sin embargo, los actuadores neumáticos también tienen algunas limitaciones. Por ejemplo, pueden ser ruidosos y consumir grandes cantidades de aire comprimido, lo que puede ser costoso. Además, debido a su diseño mecánico, los actuadores neumáticos tienen una precisión limitada y no son adecuados para aplicaciones que requieren una alta precisión de movimiento.
14.¿ Qué son los actuadores hidráulicos?
Son dispositivos automáticos que funcionan directamente con aceite o agua.
Los actuadores hidráulicos son dispositivos que convierten la energía hidráulica en movimiento lineal o rotativo. Utilizan un fluido incompresible, generalmente aceite o agua, para transmitir la energía y controlar el movimiento de una máquina o sistema.
Los actuadores hidráulicos son comunes en la industria, donde se utilizan para aplicaciones que requieren una alta fuerza y precisión de movimiento. Un actuador hidráulico típico consta de un cilindro hidráulico que contiene un pistón y una varilla de conexión. Cuando se suministra aceite al cilindro a través de una válvula, el pistón se mueve hacia fuera y empuja la varilla de conexión, lo que crea un movimiento lineal o rotativo.
Los actuadores hidráulicos tienen varias ventajas, como una alta fuerza de salida, una gran capacidad de carga, una larga vida útil y una alta precisión de movimiento. Además, los actuadores hidráulicos pueden operar en ambientes hostiles, como temperaturas extremas, ambientes húmedos y ambientes corrosivos.
Sin embargo, los actuadores hidráulicos también tienen algunas limitaciones, como el riesgo de fugas de aceite, el alto costo y la complejidad de mantenimiento. Además, debido a que utilizan aceite como fluido de trabajo, los actuadores hidráulicos no son adecuados para aplicaciones que requieren un ambiente limpio, como la industria alimentaria o la industria farmacéutica.
15.¿Cuál es la 1ª generación de robots?
La 1ª generación de robots son aquellos que repiten una o varias tareas de manera programada bajo un software, en secuencia. Estos no toman en consideración las alteraciones que se presentan en su entorno.
La primera generación de robots se desarrolló en la década de 1960 y se conoce como la generación de robots mecánicos. Estos robots fueron diseñados principalmente para realizar tareas repetitivas y peligrosas en la industria manufacturera, como la soldadura, el ensamblaje y la pintura.
Los robots de la primera generación eran grandes y pesados, con una estructura mecánica rígida y limitada movilidad. Operaban mediante la programación de movimientos predefinidos y utilizaban sensores mecánicos simples para detectar la posición y la velocidad. A menudo requerían de personal especializado para programar y operarlos.
A pesar de sus limitaciones, la primera generación de robots fue un gran avance en la automatización de la industria manufacturera y sentó las bases para el desarrollo de generaciones posteriores de robots cada vez más avanzados y versátiles.
16.¿Qué son los robots móviles?
Un robot móvil es una combinación de sistemas mecánicos y eléctricos que se desplazan de manera autónoma controlados por un software de gestión de flota.
Los robots móviles son robots que pueden moverse de un lugar a otro de manera autónoma, es decir, sin necesidad de un operador humano que los guíe. Estos robots se utilizan en una variedad de aplicaciones, como la exploración espacial, la minería, la agricultura, la logística y la seguridad.
Los robots móviles pueden tener diferentes formas y tamaños, desde pequeños robots terrestres que se mueven sobre ruedas o patas, hasta robots aéreos que vuelan utilizando helices o drones. Algunos robots móviles pueden navegar a través de entornos estructurados como almacenes o fábricas, mientras que otros están diseñados para operar en entornos desestructurados como terrenos rocosos o desiertos.
Los robots móviles utilizan una variedad de tecnologías para navegar, como sensores de proximidad, cámaras, láseres y sistemas de posicionamiento global (GPS). Estos sistemas permiten que el robot detecte su entorno y se mueva de manera segura y eficiente. Además, algunos robots móviles utilizan sistemas de inteligencia artificial para tomar decisiones autónomas sobre cómo moverse y qué acciones realizar en función de las tareas asignadas.
17.¿Que son los robots industriales?
Son máquinas de manipulación multifuncionales reprogramables, con la capacidad de mover materiales, piezas, dispositivos especiales o herramientas dentro de una línea de producción.
Los robots industriales son robots diseñados específicamente para realizar tareas en entornos industriales, como la fabricación, el ensamblaje y la manipulación de materiales. Estos robots son utilizados para mejorar la eficiencia y la productividad en las líneas de producción, así como para reducir los riesgos de seguridad para los trabajadores.
Los robots industriales son capaces de realizar una variedad de tareas, como soldadura, corte, ensamblaje, pintura, manipulación de materiales, embalaje y paletización. Estos robots se caracterizan por su estructura mecánica articulada, que les permite moverse con una gran precisión y flexibilidad.
Los robots industriales pueden ser programados para realizar tareas repetitivas y precisas de manera consistente y a alta velocidad, lo que ayuda a mejorar la calidad y la eficiencia del proceso de producción. Además, estos robots pueden operar en entornos peligrosos o de difícil acceso, como la manipulación de materiales tóxicos o inflamables.
Los robots industriales son controlados por sistemas de control programables que les permiten realizar movimientos predefinidos y adaptarse a diferentes situaciones. Estos sistemas de control también pueden incluir sensores para detectar la posición, la velocidad y la fuerza, lo que permite que el robot responda de manera precisa a su entorno y a las condiciones de trabajo.
18.¿Qué son los robots cartesianos?
Son robots industriales, que tienen tres ejes principales de control lineales y, por tanto, se mueven en línea recta en lugar de ser de forma rotativa. En este caso, los movimientos los realiza en ángulos rectos.
Los robots cartesianos, también conocidos como robots rectilíneos o robots de coordenadas rectangulares, son un tipo de robot industrial que se caracteriza por tener una estructura mecánica en la que los ejes se mueven en línea recta en coordenadas cartesianas (X, Y, Z).
Estos robots se utilizan comúnmente para tareas de manipulación y ensamblaje, como la carga y descarga de piezas en una línea de producción, debido a su capacidad para mover objetos con alta precisión en un espacio de trabajo rectilíneo. Además, los robots cartesianos son capaces de manipular objetos pesados y grandes debido a su estructura robusta y estable.
Los robots cartesianos están diseñados con una estructura en forma de caja, en la que los ejes se mueven en línea recta a lo largo de las caras de la caja. El movimiento se controla mediante motores eléctricos que accionan las guías lineales o husillos de bola que mueven los ejes.
La programación de los robots cartesianos se realiza mediante software de control, que permite controlar los movimientos en cada uno de los ejes. Además, los robots cartesianos pueden integrarse con otros componentes de automatización, como sensores y sistemas de visión, para mejorar la precisión y la eficiencia en la realización de tareas específicas.
19.¿Qué son los robots cilíndricos?
Se emplea para operaciones de ensamblaje, manipulación de máquinas herramientas, soldadura por punto y manipulación en máquinas de fundición a presión. Es un robot cuyos ejes forman un sistema de coordenadas cilíndricas.
Los robots cilíndricos, también conocidos como robots de brazo articulado, son un tipo de robot industrial que se caracteriza por tener una estructura mecánica en la que los ejes se mueven en coordenadas cilíndricas (R, θ, Z). Este tipo de robot se utiliza para una amplia variedad de aplicaciones en la industria, como el ensamblaje, la soldadura, el mecanizado, la manipulación de materiales, entre otras.
Los robots cilíndricos constan de una serie de segmentos articulados que están conectados por juntas giratorias. El primer segmento se conecta a la base del robot, mientras que el último segmento se conecta a la herramienta o el dispositivo final que realiza la tarea específica.
El movimiento de los segmentos se controla mediante motores eléctricos que accionan las juntas giratorias. Esto permite al robot moverse en varias direcciones y en diferentes planos, lo que lo hace muy versátil en términos de movilidad y alcance.
La programación de los robots cilíndricos se realiza mediante software de control que permite controlar los movimientos en cada uno de los ejes y las juntas. Además, los robots cilíndricos pueden integrarse con otros componentes de automatización, como sensores y sistemas de visión, para mejorar la precisión y la eficiencia en la realización de tareas específicas.
20.¿Qué son los robots androides?
Son los robots que imitan, en cierta medida, la apariencia y la conducta humana. Los robots androides son robots con forma humana o antropomórfica, diseñados para imitar la apariencia y el comportamiento humano. Estos robots suelen tener un cuerpo similar al humano, con dos brazos, dos piernas y una cabeza que contiene los sensores y sistemas de procesamiento necesarios para su funcionamiento.
Los robots androides se utilizan principalmente en aplicaciones de entretenimiento, como en películas y juegos de video, así como en la investigación y el desarrollo de la inteligencia artificial y la robótica. También se han desarrollado robots androides para tareas específicas, como la atención al cliente y la asistencia sanitaria.
Para lograr una apariencia humana, los robots androides suelen contar con una piel sintética y características faciales que imitan la expresión humana. Además, están equipados con una serie de sensores y cámaras que les permiten interactuar con los seres humanos de manera más natural.
La programación de los robots androides es compleja y requiere de sistemas de inteligencia artificial avanzados que les permitan aprender y adaptarse a nuevas situaciones y tareas. También pueden integrarse con otros sistemas de automatización, como la visión artificial y la detección de voz, para mejorar su capacidad de interactuar con el entorno y realizar tareas específicas.
21.- ¿Qué tipos de procedimientos de control se utilizan en los robots?
La inmensa mayoría de los robots que hoy día se utilizan con fines industriales se controlan mediante un proceso en bucle cerrado, es decir, mediante un bucle de realimentación. Este control se lleva a cabo con el uso de un sensor de la posición real del elemento terminal.
Sensores externos: De proximidad
Sensores internos: De posición
Los robots usan control del tipo lazo cerrado, lo cual significa que ahora son bastante conscientes de su entorno y pueden adaptarse al mismo.
En general, la elección del procedimiento de control depende de las necesidades específicas de la aplicación y las características del robot en sí mismo.